Transfer Path Analysis#
Introduction#
Transfer path analysis (TPA) is a tool for the characterization of actively vibrating components and the propagation of noise and vibrations to the connected passive substructures.

When should I use TPA?#
Typical TPA implementation in NVH problems concerns reducing undesired noise or vibrations in order to improve comfort, safety, or stealth. Using TPA, the following challenges can be tackled:
1. Source excitations are unmeasurable in practice#
It is not difficult to imagine an active component with operational excitation (far) too complex to model or measure. Just think of…well, any source really:

With TPA, operational loads can be measured. Well, not directly…

2. Distinguish partial transfer paths and find most dominant one#
Amongst all transfer paths, the most dominant one can be easily pinpointed.

3. Predict response at the passive side#
With operational interface loads you can easily predict responses at the structure fixed to the source.

Development can be significantly speed up in this manner, and fewer tests are required since it is not necessary to test all configurations.
4. Combine different physical domains to describe transfer path problem#
Besides typical response measurements using accelerometers, the implementation of strain or sound pressure measurements is also straightforward.

Which TPA methods can I use?#
A wide range of different TPA methods speaks for its popularity and applicability. In general, TPA methods are classified into three large families: classical, component-based, and transmissibility-based. The entire framework is depicted in the following Figure, followed by the basic properties of the individual families.

Classical TPA#
Classical TPA methods conduct measurements on the assembled products AB to obtain interface forces between the active and passive sides. Usually, these methods are applied to troubleshoot NVH problems in already existing products. Interface forces can be measured directly between the substructures (direct force method) if stiff force transducers are mounted directly at the interface while the assembly is subjected to the operational excitation. Interface forces can also be estimated for cases when both sides of the interface are connected through a resilient mount (mount stiffness method). As mounting force transducers at the interface are usually impractical, an inverse procedure can be applied to estimate interface forces that replicate responses around the interface. This matrix inverse method is a practical method, however, it requires separate measurement of the FRFs, followed by the measurement of the operational responses.

Pros#
✓ Interface forces replicate operational excitation.
✓ Identification of transfer path contribution.
Cons#
✗ Interface forces are valid for the measured assembly only.
✗ High force transducer sensor stiffness and impractical mounting for the direct force method.
✗ Dismounting of the assembly.
Component-based TPA#
The main disadvantage of the classical TPA methods is the non-transferability of the interface forces in case the passive substructure is modified in any way. This explains why classical TPA is mainly used on the existing products only. This drawback can be resolved by using component-based TPA, which describes operational excitation in terms of equivalent forces. Equivalent forces are non-existing load on the assembly interface which, if applied, would counteract operational excitation. Thus, they are property of the active part only and are transferable to an assembly with a modified passive side. They replicate the same responses at the passive side as caused by operational loads.
The simplest way to measure equivalent forces is to rigidly support the active component only with the associated testbench. In this manner, interface displacements are zero, and forces at the interface are solely the equivalent forces. They can be measured by mounting stiff force transducers at the interface (blocked force method). If the interface is left free, however, no equivalent forces are acting on the active component and all vibrations are seen as free displacements. Equivalent forces, required to attenuate these free displacements, are then calculated by the free velocity method. In cases when the testbench is compliant, it can be accounted for with the hybrid interface method. In-situ and pseudo-forces methods even eliminate the need to dismount any part of the assembly in order to determine equivalent forces.

Pros#
✓ Equivalent forces replicate operational excitation.
✓ Identification of transfer path contribution.
✓ Transferability of the equivalent forces to an assembly with a modified passive side.
✓ Perfect for structural modifications in product development.
Cons#
✗ Direct measurements of the equivalent moments.
✗ High force transducer sensor and testbench stiffness for the blocked force method.
✗ Running active components at the free conditions is difficult for the free velocity method.
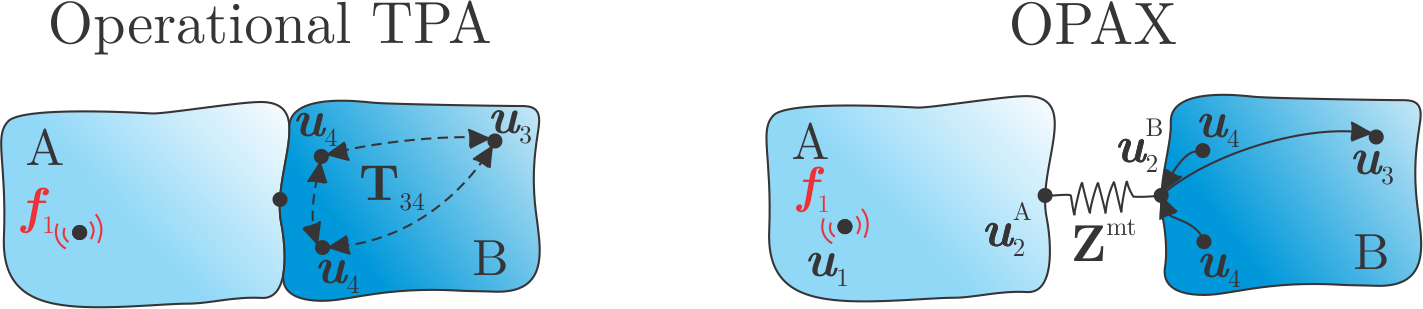
Transmissibility-based TPA#
If one is only interested in dominant transfer paths and source excitation are of no interest, the transmissibility-based TPA family is a viable and simple solution. Transfer paths are characterized solely by transmissibilities between sensors around the connection points. With operational TPA (OTPA) transfer path contributions are evaluated via transmissibility matrix, which is built from responses at the passive side, conducted under various operational loads. Operational mount identification (OPAX) is a hybrid TPA method for the estimation of mount stiffness parameters from the operational test.
Pros#
✓ Description of the operational excitation is not needed.
✓ Only measurement of the operational response is required and no FRFs.
✓ Measurement is performed on the assembly only and no dismounting is needed.
✓ Simplistic combination of different types of sensors.
Cons#
✗ Operational interface loads are not known.
✗ Results are strongly dependent on the choice of the sensor locations as some transmission paths may be missed.
Transfer path problem#
Consider an assembly of substructures A and B, coupled at the interface, as depicted below. Substructure A is an active component with the operational excitation \(\boldsymbol{f}_1\) acting at node 1. Meanwhile, no excitation force is acting on passive substructure B. The responses on B in \(\boldsymbol{u}_3\) and \(\boldsymbol{u}_4\) are hence a consequence of the active force \(\boldsymbol{f}_1\) only:

\(\boldsymbol{u}_1\textbf{:}\) internal DoFs at the active side in which operational excitation is present. \(\boldsymbol{u}_2\textbf{:}\) boundary DoFs at the interface between active and passive side. \(\boldsymbol{u}_3\textbf{:}\) internal DoFs at locations of interest on the passive side \(\boldsymbol{u}_4\textbf{:}\) internal DoFs, also named indicator responses, located in the proximity of the interface.#
Responses at the passive side can be evaluated by multiplying force spectra \(\boldsymbol{f}_1\) with the respective transfer functions \(\mathbf{Y}_{31}^{\text{AB}}\):
Operational excitations \(\boldsymbol{f}_1\) are unknown in practice. One can, however, express them in terms of interface forces \(\boldsymbol{\lambda}\) and substructures’ admittances using LM FBS notation.

Equation of motion for both substructures are incorporated into matrix-diagonal form as written below. External forces are acting only at node 1 and connectivity forces are only present at both sides of the interface.
Next, compatibility condition between both substructures is considered which ensures that there is no spatial gap at the interface:
Since displacements are prescribed at the interface, forces that enforce compatibility conditions are required (interface forces \(\boldsymbol{g}_2\)). Interface forces are equal in magnitude on both sides of the interface but opposite in sign:
Interface forces can be expressed using a set of Lagrange multipliers \(\boldsymbol{\lambda}\):
With equation of motion for subsystems A and B, compatibility and equilibrium conditions we can express interface forces \(\boldsymbol{\lambda}\) in terms of subsystems’ admittances. Equating \(\boldsymbol{u}_2^{\text{A}}\) and \(\boldsymbol{u}_2^{\text{B}}\) yields:
From the last two equations of motion we obtain:
or responses at the passive side as a consequence of an operational load expressed from the assembled admittance.
Component-based TPA: Equivalent source concept#
Now, we assume that all operational responses as a consequence of \(\boldsymbol{f}_1\) can be fully expressed by \(\boldsymbol{f}_2^{\text{eq}}\) (yet unknown) acting on the source.

Again we can write an equation of motion for the uncoupled system along with compatibility and equilibrium conditions:
We repeat the procedure above. First, we express interface forces \(\boldsymbol{\lambda}\):
Followed by the passive side responses:
In-situ TPA#
Source excitations \(\boldsymbol{f}_1\) are often not measurable in practice. Equivalent forces, applied at the interface DoFs, generates the same responses at the passive side as \(\boldsymbol{f}_1\).
The application of \(\boldsymbol{f}_1\) and the reaction of equivalent forces \(\boldsymbol{f}_2^{\mathrm{eq}}\) removes any response on the passive side.

The response at the interface \(\boldsymbol{u}_2\) or the indicator DoFs \(\boldsymbol{u}_4\) can be used to calculate the equivalent forces, in a manner that the responses at B are zero:

We can then express equivalent forces from interface displacements:

Or from displacements at the indicator DoFs:

Now let us examine how equivalent forces are a property of the active side only and are invariant of any passive substructure coupled to it.
By expressing \(\boldsymbol{f}_2^{\mathrm{eq}}\) we obtain:
And thus prove \(\boldsymbol{f}_2^{\mathrm{eq}}\) are only dependable on the active side’s admittance and operational excitation.
The responses \(\boldsymbol{u}_3\) remain independent of \(\boldsymbol{f}_2^{\mathrm{eq}}\), as they are not considered in the calculation of the latter. The predicted response \(\boldsymbol{\tilde{u}}_3\) as a consequence of \(\boldsymbol{f}_2^{\mathrm{eq}}\) only can be expressed as:

By comparing the predicted \(\boldsymbol{\tilde{u}}_3\) and the measured \(\boldsymbol{u}_3\) it is possible to evaluate whether the transfer paths through the interface are sufficiently well described by \(\boldsymbol{f}_2^{\mathrm{eq}}\).
This approach can be useful for an on-board validation when the prediction is performed on the assembly AB, or cross validation when applied to the assembly with a modified passive side (\(\mathrm{A\tilde{B}}\)).

In-Situ TPA - Measurement Campaign#
Operational measurement campaign#
Measurement of the output signal by source excitation → \(\boldsymbol{{u}}_{3}, \boldsymbol{{u}}_{4}\)
Avoiding dismounting of any part
Outputs: Sensors and/or microphones

To ensure that the equivalent forces are independent of the receiver structure, the operating excitation must originate solely from the source structure.
A potential violation of this assumption could occur with gearboxes. Consider a gearbox whose housing is rigidly connected to a stiff receiver. Due to manufacturing tolerances, the housing is slightly deformed after assembly with the receiver. The resulting misalignment of the gears would be an important mechanism changing the internal loads \(f^\mathrm{A}_{1}\), which is dependent on the specific receiver (how much is the housing deformed by the mounting?). Care has to be taken so that this assumption is not violated.
FRF measurement campaign#
FRFs from hammer impacts at the interface
→ \(\mathbf{Y}_\mathrm{42,uf}, \mathbf{Y}_\mathrm{32,uf}\)

VPT reconstruction#
Transformation of the hammer inputs to virtual loads

Limitations of in-situ TPA#
limited to linear time-invariant systems
many systems have nonlinear components → errors in the equivalent forces → transferability is limited
References