VPT Coupling#
The frequency-based substructure coupling is embedded in pyFBS.
In particular, the admittance-based dual formulation named Lagrange-Multiplier Frequency-Based Substructuring (LM-FBS) is implemented 1.
In the following, a basic coupling of two numerically-generated substructures is presented.
The virtual point transformation 2 is applied to impose collocated matching DoFs at the interface.
This can also be performed analogously with experimentally acquired data.
Note
Download example showing a substructure coupling application: 07_coupling.ipynb
Tip
Why use virtual point when coupling substructures?
Complex interfaces are very often inaccessible for the measurement equipment. Therefore measurements are often performed away from the actual interface. Also, the collocation of DoFs at the neighboring interfaces is almost impossible to ensure. Virtual point, on the other hand, can be defined in an arbitrary location at the interface that coincides for all substructures.
Virtual point accounts for rotational degrees of freedom, which are mandatory for the successful coupling of the substructures.
By the reduction of measurements to the virtual point the interface problem is weakened. That means that compatibility and equilibrium conditions on the measured DoFs are a bit more relaxed. In this manner, unwanted stiffening effects can be avoided.
Due to the reduction, measurement errors such as bias from sensor positioning or uncorrelated measurement noise are filtered out to some extend.
Example Datasets and 3D view#
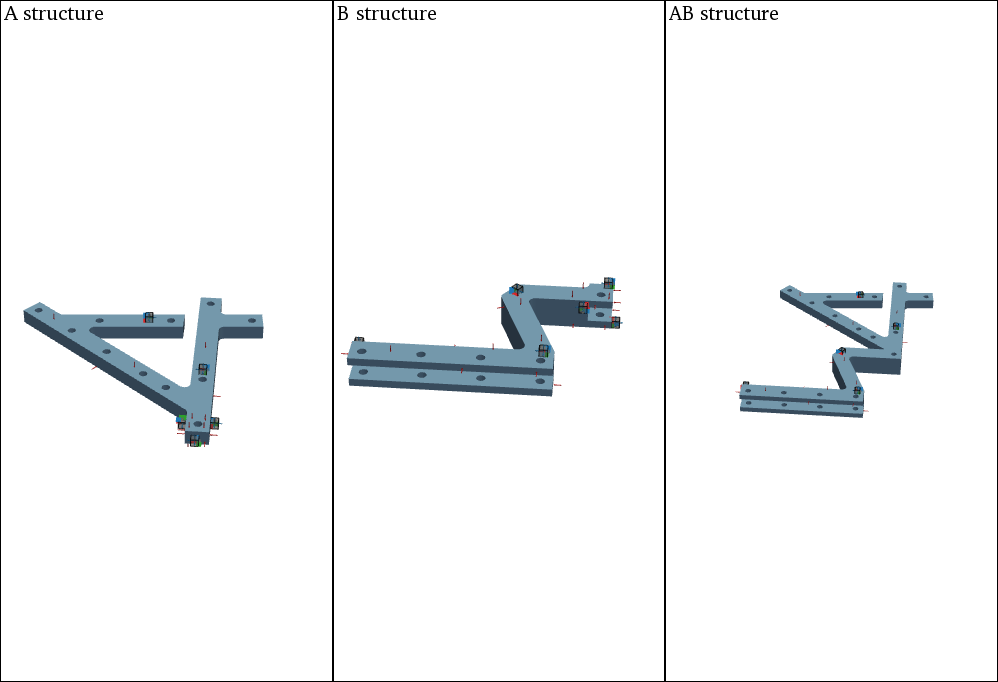
Load the required predefined datasets and open the 3D viewer in the background as already shown in 3D Display. Especially for the illustration of different substructures and the assembly, the 3D viewer subplot capabilities of PyVista can be used.
view3D = pyFBS.view3D(show_origin = False, show_axes = False,shape = (1,3),title = "Overview")
Add an STL file of substructure A to the 1-1 subplot and show the corresponding accelerometers, channels and impacts.
view3D.plot.subplot(0,0)
view3D.plot.isometric_view()
view3D.plot.add_text("A structure", position='upper_left', font_size=10, color="k", font="times", name="A_structure")
view3D.add_stl(stl_dir_A,color = "#83afd2",name = "A");
view3D.show_acc(df_acc_A)
view3D.show_imp(df_imp_A)
view3D.show_chn(df_chn_A)

Add an STL file of substructure B to the 1-2 subplot and show the corresponding accelerometers, channels and impacts.
view3D.plot.subplot(0,1)
view3D.plot.isometric_view()
view3D.plot.add_text("B structure", position='upper_left', font_size=10, color="k", font="times", name="B_structure")
view3D.add_stl(stl_dir_B,color = "#83afd2",name = "B");
view3D.show_acc(df_acc_B,overwrite = False)
view3D.show_imp(df_imp_B,overwrite = False)
view3D.show_chn(df_chn_B,overwrite = False)

Add an STL file of the assembly AB to the 1-2 subplot and show the corresponding reference accelerometers, channels and impacts.
view3D.plot.subplot(0,2)
view3D.plot.isometric_view()
view3D.plot.add_text("AB structure", position='upper_left', font_size=10, color="k", font="times", name="AB_structure");
view3D.add_stl(stl_dir_AB,color = "#83afd2",name = "AB");
view3D.show_acc(df_acc_AB,overwrite = False)
view3D.show_imp(df_imp_AB,overwrite = False)
view3D.show_chn(df_chn_AB,overwrite = False)
Each separate subplot view can also be linked or unlinked:
view3D.plot.link_views()
#view3D.plot.unlink_views()
Tip
With pyFBS you can simply prepare the experiments before hand!
Position your virtual accelerometers and sensors on 3D model, generate numerical FRFs and make sure that everything is in order.
Then, perform your experiment, following the sensor setup you prepared in your virtual example.
Simply replace numerical FRFs with experimental ones, and results are only few clicks away!
Virtual point transformation#
Tip
It would be impractical to measure interface admittance for both substructures in multiple DoFs at the interface and furthermore ensure, that these DoFs are perfectly collocated. Therefore we adopt VPT in order to obtain a collocated full-DoF interface admittance matrix for each substructure.
The VPT can be performed directly on the measured/generated FRFs. See the 04_VPT.ipynb example for more options and details.
df_vp = pd.read_excel(pos_xlsx, sheet_name='VP_Channels')
df_vpref = pd.read_excel(pos_xlsx, sheet_name='VP_RefChannels')
vpt_A = pyFBS.VPT(df_chn_A_up,df_imp_A_up,df_vp,df_vpref)
vpt_B = pyFBS.VPT(df_chn_B_up,df_imp_B_up,df_vp,df_vpref)
Apply the defined VP transformation on the FRFs:
vpt_A.apply_VPT(MK_A.freq,MK_A.FRF)
vpt_B.apply_VPT(MK_B.freq,MK_B.FRF)
Extract the requried FRFs and the frequency vector:
freq = MK_A.freq
Y_A = vpt_A.vptData
Y_B = vpt_B.vptData
LM-FBS Coupling#
First, construct an admittance matrix for the uncoupled system, containing substructure admittances:
Y_AnB = np.zeros((Y_A.shape[0],Y_A.shape[1]+Y_B.shape[1],Y_A.shape[2]+Y_B.shape[2]), dtype=complex)
Y_AnB[:,:Y_A.shape[1],:Y_A.shape[2]] = Y_A
Y_AnB[:,Y_A.shape[1]:,Y_A.shape[2]:] = Y_B
Next the compatibility and the equilibrium conditions has to be defined through the signed Boolean matrices Bu and Bf.
Make sure that the correct DoFs are selected for the coupling. In the following example the 6 virtual/generalized DoFs at the interface are matched, so the size of the Boolean matrix should be 6 × 30 (30 is the sum of all DoFs from both substructures A and B).
k = 6
Bu = np.zeros((k,Y_A.shape[1]+Y_B.shape[1]))
Bu[:k,6:6+k] = 1*np.eye(k)
Bu[:k,12:12+k] = -1*np.eye(k)
Bf = np.zeros((k,Y_A.shape[2]+Y_B.shape[2]))
Bf[:k,6:6+k] = 1*np.eye(k)
Bf[:k,12:12+k] = -1*np.eye(k)


For the LM FBS method, having defined \(\mathbf{Y^{\text{A|B}}}\), \(\mathbf{B}_\text{u}\) and \(\mathbf{B}_\text{f}\) is already sufficient to perform coupling:
Y_ABn = np.zeros_like(Y_AnB,dtype = complex)
Y_int = Bu @ Y_AnB @ Bf.T
Y_ABn = Y_AnB - Y_AnB @ Bf.T @ np.linalg.pinv(Y_int) @ Bu @ Y_AnB
Results#
First extract the FRFs at the reference DoFs:
arr_coup = [0,1,2,3,4,5,18,19,20,21,22,23,24,25,26,27,28,29]
Y_AB_coupled = Y_ABn[:,arr_coup,:][:,:,arr_coup]
Y_AB_ref = MK_AB.FRF
The coupled and the reference results can then be compared and evaluated:
That’s a wrap!
Want to know more, see a potential application? Contact us at info.pyfbs@gmail.com!
References
- 1
de Klerk D, Rixen DJ, Voormeeren SN. General framework for dynamic substructuring: history, review and classification of techniques. AIAA journal. 2008 May;46(5):1169-81.
- 2
van der Seijs MV, van den Bosch DD, Rixen DJ, de Klerk D. An improved methodology for the virtual point transformation of measured frequency response functions in dynamic substructuring. In4th ECCOMAS thematic conference on computational methods in structural dynamics and earthquake engineering 2013 Jun (No. 4).